Edit 21 Jan 2013: added “Example 3” to the title.
Introduction
I’m going to jump right in and imagine that we have a known plant which we wish to control using P, PI, or PID. I’m going to assume that you have some idea what those are. We’ve seen proportional (P) control, where the control signal is proportional to the error. Integral control has a signal which is proportional to the integral of the error, and derivative control a signal which is proportional to the rate of change (the derivative) of the error. Proportional control is always used in conjunction with integral, hence PI. Although derivative control can be used with only proportional, in process control we generally use both integral and proportional with it, hence PID. We’ll talk more about them in subsequent posts, but for now I want to show you two ways to get the required parameters. They may not always be very good values, but they’ll be better than in the ballpark. At the very least, they are good starting values for further investigation.
Oh, I am aware that Mathematica® version 9 has new capabilities for tuning controllers – but let me write about what I know, using version 8.
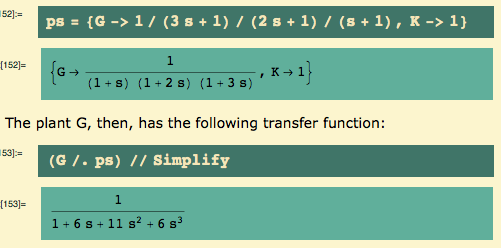
My plant is a 3rd-order transfer function… as usual, rules are a convenient way to specify things:
Read the rest of this entry »



 :
:


